Russian - 13
2. ОПИСАНИЕ
Рабочий метод
Газонокосилка-робот автоматически стрижет
газон. Она работает по принципу постоянного
движения и подзарядки.
Зарядная станция посылает сигнал, который
газонокосилка-робот распознает на расстоянии
6-7 метров. Косилка направляется к зарядной
станции, когда аккумулятор слишком разряжа-
ется. Когда газонокосилка-робот ищет зарядную
станцию, операция стрижки травы прекращает-
ся
Когда газонокосилка-робот ищет зарядную стан-
цию, она использует один или более из трех ме-
тодов поиска: метод беспорядочного движения,
движение вдоль провода ограждения и вдоль
направляющего провода. Для более подробной
информации см. Параграф 2.3. «Метод поис-
ка» на странице 15 и «Вдоль провода» (3-2-2-)
на странице 53.
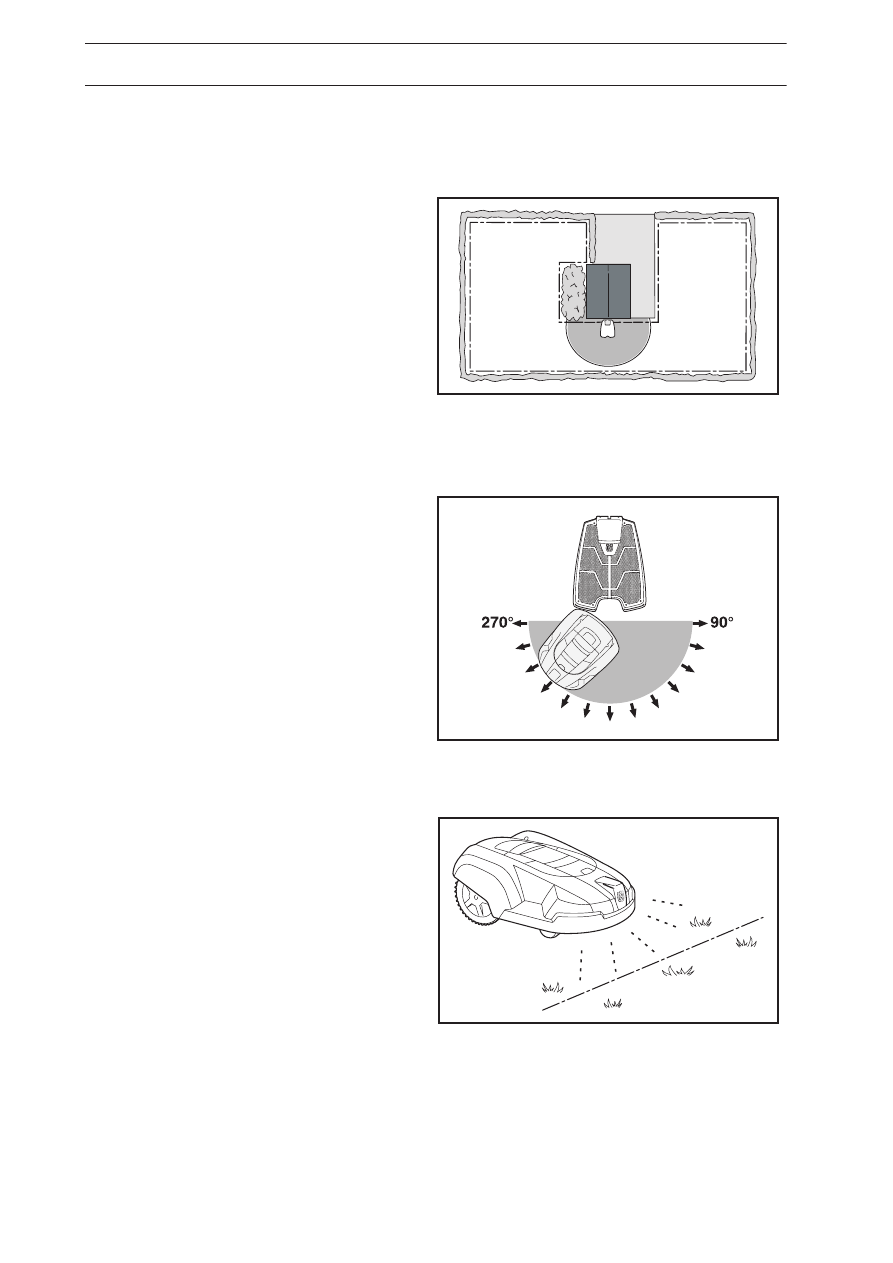
Когда аккумуляторы полностью заряжаются,
косилка двигается назад, поворачивается и
покидает зарядную станцию в направлении,
выбранном произвольно, в пределах сектора
выхода в 90° - 270°.
Чтобы газонокосилке-роботе было легче доб-
раться до всех зон участка, вы можете вручную
установить режим выхода из зарядной станции,
для этого см. Параграф 6.5. Участок (3) на
странице 49.
Когда газонокосилка-робот натыкается на пре-
пятствие, она включает задний ход и выбирает
новое направление.
Два датчика, на передней и задней части га-
зонокосилки-робота, чувствуют, когда косилка
приближается к ограждающему проводу. Газо-
нокосилка-робот наезжает на провод примерно
на 25 см прежде чем повернуть. Длину наезда
можно установить, для этого см. параграф Че-
рез провод (3-4-1) на стр. 58.

































































































