90
версия
программы
5.2
•
Нажмите
,
чтобы
удалить
линию
АВ
.
В
шаблоне
SmartPath
можно
создать
до
20
различных
линий
АВ
.
•
Нажмите
кнопку
"
Назад
",
чтобы
закрыть
окно
.
Цикличное
переключение
между
загруженными
путями
Нажмите
:
кнопку
"
Карта
" >
вкладку
"
Навигация
" (
в
инструментах
картирования
) >
кнопку
"
Активный
цикл
линии
"
Нажмите
для
цикличного
переключения
путей
,
загруженных
в
SmartPath.
Если
транспортное
средство
двигается
по
проекции
траектории
,
навигационная
система
использует
ее
в
качестве
последующей
траектории
.
После
создания
линии
АВ
можно
переключаться
между
линией
АВ
и
шаблонами
SmartPath
нажатием
"
Переключение
АВ
/SmartPath".
После
переключения
навигационной
системы
на
другую
траекторию
,
в
окне
"
Карта
"
отображается
имя
текущего
шаблона
в
черном
поле
.
Окно
"
Карта
"
меняет
свой
вид
на
"
Вид
с
перспективой
",
а
внизу
инструментов
картирования
отображаются
настройки
SmartPath.
Двигайтесь
по
траектории
,
которую
нужно
создать
.
Примечание
.
Дисплей
создаст
точку
А
с
помощью
SmartPath,
только
если
он
используется
для
выполнения
картировании
прямой
линии
АВ
. (
Для
получения
дополнительной
информации
см
.)
После
включения
первого
прохода
навигация
системы
будет
следовать
по
малиновой
линии
,
параллельной
ранее
сделанному
проходу
.
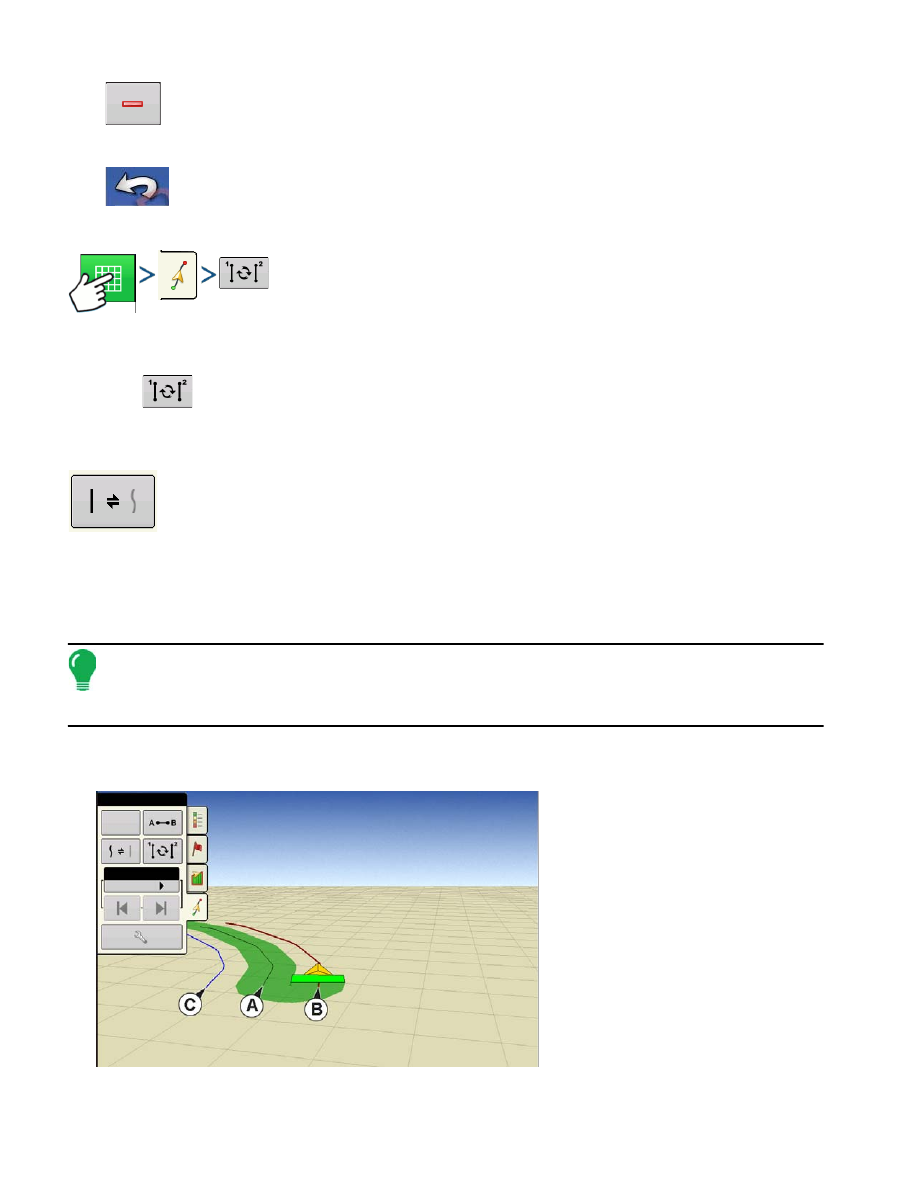
По
мере
продолжения
использования
SmartPath
в
окне
карты
отобразятся
три
линии
:
• (
А
)
Базовая
траектория
Выглядит
как
черная
линия
и
является
исходной
линией
SmartPath
созданной
во
время
первого
прохода
.
• (
В
)
Последующая
траектория
Выглядит
как
малиновая
линия
и
является
путем
,
использующимся
транспортным
средством
в
настоящее
время
.
Сброс
Smart
Отклонение
: 38
см
Всего
: 0
фт
.
 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 32
32
 33
33
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
 50
50
 51
51
 52
52
 53
53
 54
54
 55
55
 56
56
 57
57
 58
58
 59
59
 60
60
 61
61
 62
62
 63
63
 64
64
 65
65
 66
66
 67
67
 68
68
 69
69
 70
70
 71
71
 72
72
 73
73
 74
74
 75
75
 76
76
 77
77
 78
78
 79
79
 80
80
 81
81
 82
82
 83
83
 84
84
 85
85
 86
86
 87
87
 88
88
 89
89
 90
90
 91
91
 92
92
 93
93
 94
94
 95
95
 96
96
 97
97
 98
98
 99
99
 100
100
 101
101
 102
102
 103
103
 104
104
 105
105
 106
106
 107
107
 108
108
 109
109
 110
110
 111
111
 112
112
 113
113
 114
114
 115
115
 116
116
 117
117
 118
118
 119
119
 120
120
 121
121
 122
122
 123
123
 124
124
 125
125
 126
126
 127
127
 128
128
Инструкции и руководства похожие на Ag Leader Compass Manual







Другие инструкции и руководства из категории Разное











