91
Н
АВИГАЦИЯ
• (
С
)
Проекция
траектории
Выглядит
как
синяя
линия
на
противоположной
стороне
от
базовой
траектории
и
является
альтернативной
траекторией
,
параллельной
базовой
траектории
.
Системная
навигация
создала
эту
траекторию
после
создания
базовой
траектории
.
По
этой
траектории
двигалось
бы
транспортное
средство
,
если
бы
оно
поменяло
направление
движения
на
противоположное
.
•
Примечания
SmartPath:
-
Проекция
траектории
и
базовая
траектория
остаются
в
памяти
дисплея
до
тех
пор
,
пока
не
будет
нажата
кнопка
"
Сброс
"
без
сохранения
шаблона
SmartPath.
-
Нажатие
на
кнопку
"
Сохранить
"
сохраняет
в
памяти
дисплея
все
проходы
SmartPath
для
использования
в
будущем
.
Выберите
предыдущий
проход
SmartPath
Если
выбран
SmartPath
в
качестве
нужного
шаблона
,
но
транспортное
средство
не
следует
за
активным
навигационным
шаблоном
,
навигационная
система
автоматически
начнет
поиск
шаблонов
SmartPath
для
использования
.
Если
нужно
использовать
ранее
созданный
шаблон
SmartPath,
это
можно
сделать
нажатием
кнопки
"
Поиск
активной
линии
".
Эта
кнопка
позволяет
переключаться
между
доступными
шаблонами
SmartPath.
•
Примечания
.
-
Когда
навигационная
система
ищет
другие
доступные
шаблоны
SmartPath,
она
в
первую
очередь
отображает
ближайшие
доступные
проходы
.
-
Вы
можете
регулировать
доступную
площадь
,
в
которой
навигационная
система
осуществляет
поиск
ранее
созданных
проходов
SmartPath.
Для
этого
отрегулируйте
настройку
"
Пороговое
значение
курса
"
на
вкладке
"Smart"
окна
"
Параметры
навигации
".
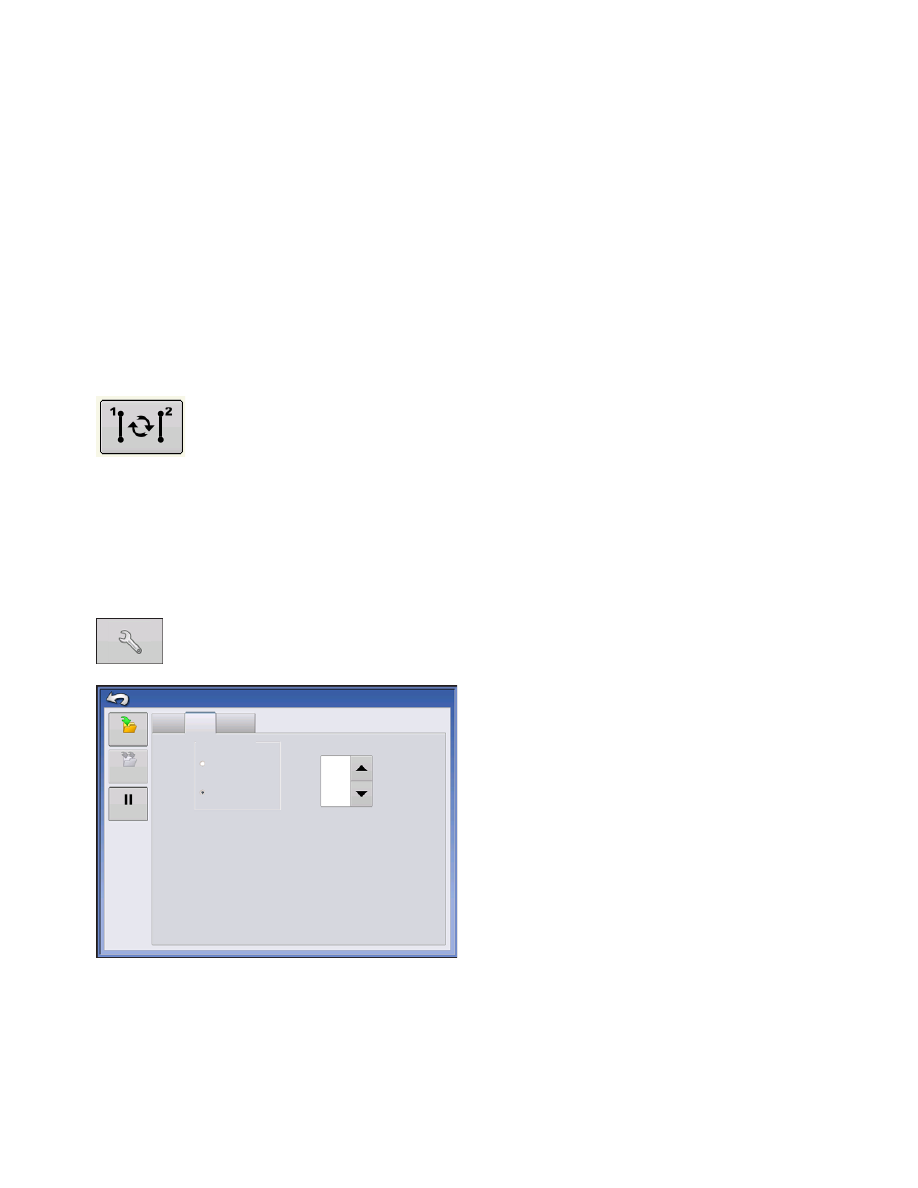
Параметры
навигации
SmartPath
SmartPath
создает
проход
SmartPath
только
в
случае
регистрации
данных
на
поле
.
Однако
имеется
возможность
его
использовать
для
постоянного
создания
проходов
SmartPath
во
время
всех
полевых
работ
.
Для
регулировки
этой
настройки
нажмите
кнопку
"
Параметры
навигации
"
на
вкладке
"
Навигация
".
Появится
окно
"
Параметры
навигации
".
Нажмите
вкладку
"
Интеллектуальный
".
•
Значением
по
умолчанию
является
Зарегистрированная
площадь
.
Эта
настройка
создает
проходы
только
во
время
регистрации
полевых
данных
.
•
Выбор
"
Вся
охваченная
площадь
"
позволяет
создавать
проходы
SmartPath
даже
без
регистрации
полевых
данных
.
•
Настройкой
Пороговое
значение
курса
является
доступная
площадь
,
в
которой
навигационная
система
осуществляет
поиск
ранее
созданных
проходов
SmartPath.
Значение
по
умолчанию
равно
20
градусам
.
При
выборе
параметра
"
Адаптивная
кривая
"
в
качестве
параметра
шаблона
в
окне
"
Новый
шаблон
"
появится
кнопка
"
Адаптивная
кривая
"
в
окне
"
Параметры
навигации
".
Эта
кнопка
открывает
окно
"
Параметры
адаптивного
шаблона
".
В
этом
окне
можно
выбрать
параметры
шаблона
,
которые
укажут
системе
место
регистрации
нового
прохода
.
В
эти
параметры
входят
:
Отклонение
Создание
полосы
Smart
Световая
полоса
Сохранить
Пауза
Зарегистрированная
область
Порог
курса
Вся
покрытая
область
20
Параметры
навигации
градусы
Сохранить
группу
 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 32
32
 33
33
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
 50
50
 51
51
 52
52
 53
53
 54
54
 55
55
 56
56
 57
57
 58
58
 59
59
 60
60
 61
61
 62
62
 63
63
 64
64
 65
65
 66
66
 67
67
 68
68
 69
69
 70
70
 71
71
 72
72
 73
73
 74
74
 75
75
 76
76
 77
77
 78
78
 79
79
 80
80
 81
81
 82
82
 83
83
 84
84
 85
85
 86
86
 87
87
 88
88
 89
89
 90
90
 91
91
 92
92
 93
93
 94
94
 95
95
 96
96
 97
97
 98
98
 99
99
 100
100
 101
101
 102
102
 103
103
 104
104
 105
105
 106
106
 107
107
 108
108
 109
109
 110
110
 111
111
 112
112
 113
113
 114
114
 115
115
 116
116
 117
117
 118
118
 119
119
 120
120
 121
121
 122
122
 123
123
 124
124
 125
125
 126
126
 127
127
 128
128
















